
Stewart Platform
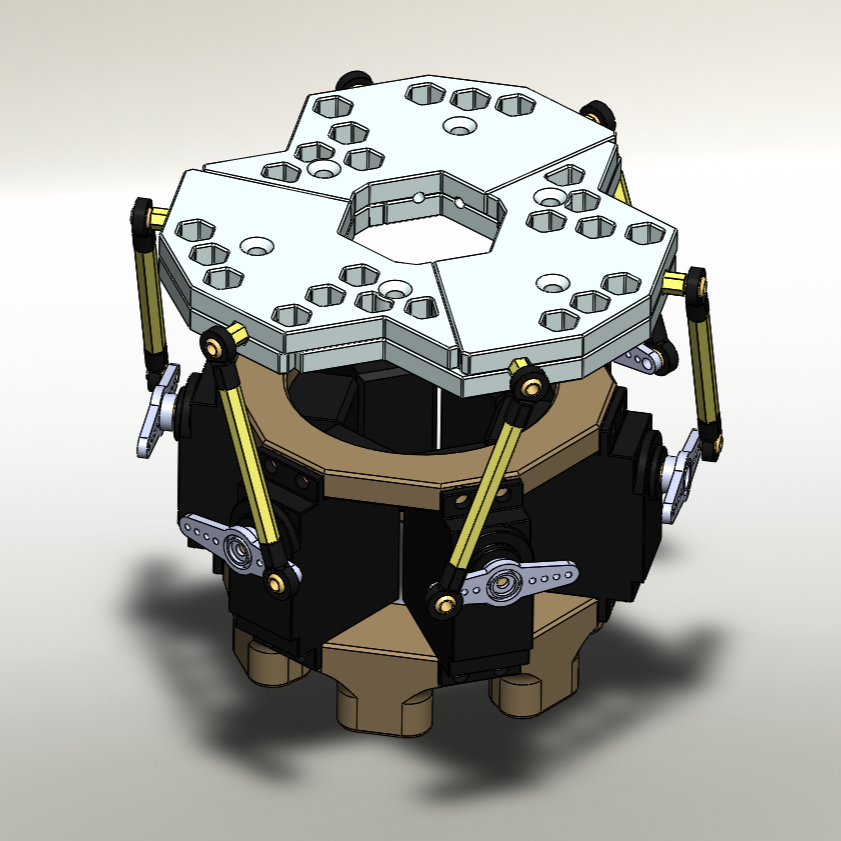
CAD for my stewart platform, in Solidworks.

I controlled the 6 hobby servos with an arduino mounted to the end effector.

I used an IMU and PID controllers to dampen the acceleration of the end effector in all 3 translational directions and yaw,
and I used the angle estimate to keep the end effector level in roll and pitch
Contact
- terrytao19@gmail.com
- 631-951-7354
- 2603 Draper Dr, Ann Arbor MI 48109